Applied to Deep Pipeline Inspection and Foreign Object Cleaning and Retrieval System
Eddie SHIH | Taiwan
Applied to Deep Pipeline Inspection and Foreign Object Cleaning and Retrieval System
Eddie SHIH
Taiwan
Detail
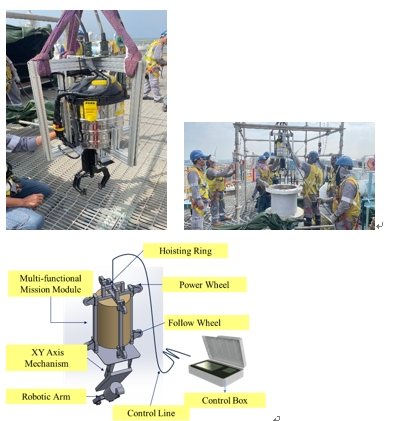
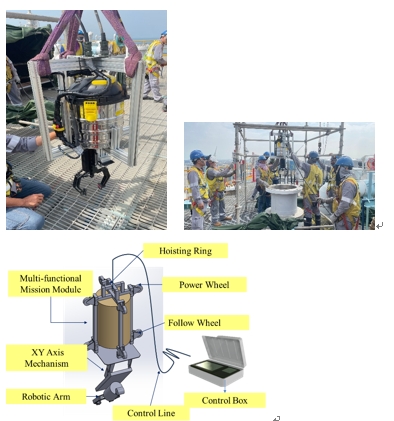
This invention is designed for humanitarian rescue operations in narrow, deep wells and underground pipelines, replacing personnel entry into hazardous, confined, polluted, or unknown underground environments. The system integrates a multi-axis robotic arm with life detection and environmental sensing modules to perform life search, condition assessment, and hazardous material extraction and removal. The modular vehicle structure allows the descent and control mechanisms to be separated or combi
National Research Council of Thailand
Ministry of Higher Education, Science, Research and Innovation
196 Phaholyothin Road, Ladyao, Chatuchak, Bangkok, 10900
Tel. +662 579 1370 - 9 ext. 506, 532
E-mail: intinventor.rekm@nrct.go.th